


Section: New Results
Recovering Tracking Errors with Human Re-identification
Participants : Julien Badie, Slawomir Bak, Duc-Phu Chau, François Brémond, Monique Thonnat.
keywords: tracking error correction, re-identification
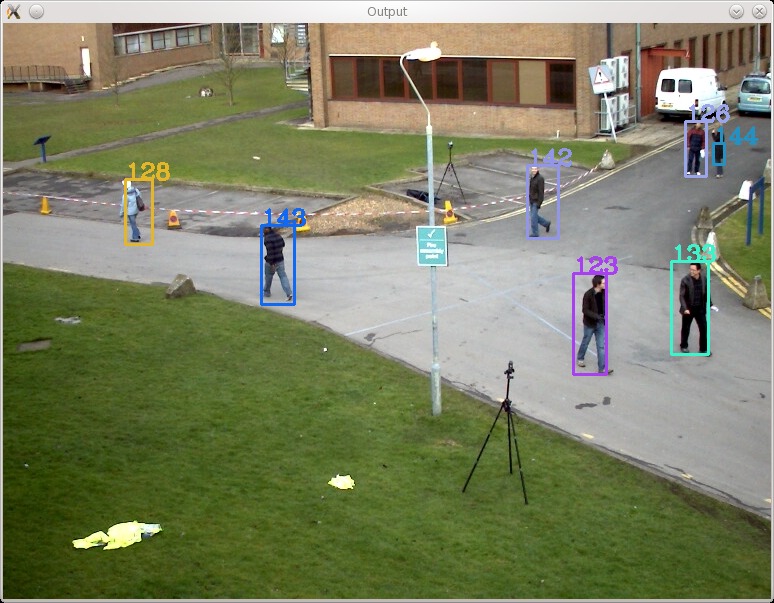
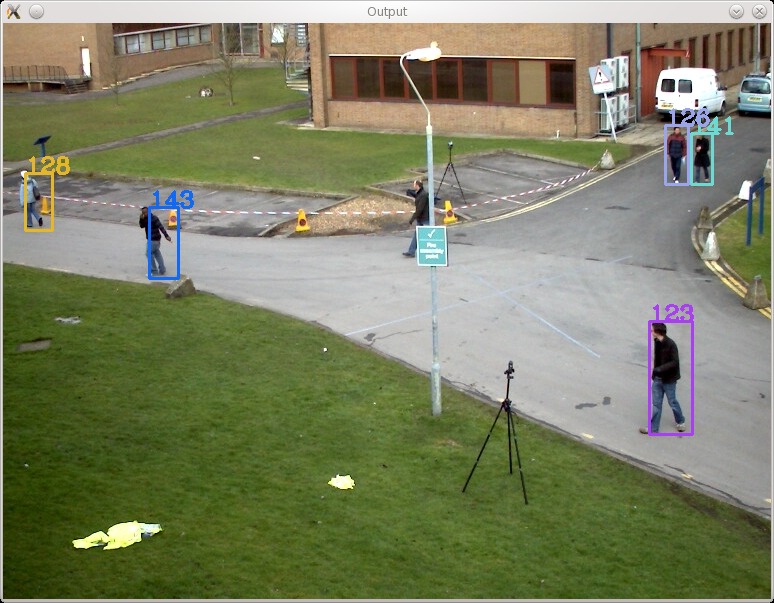
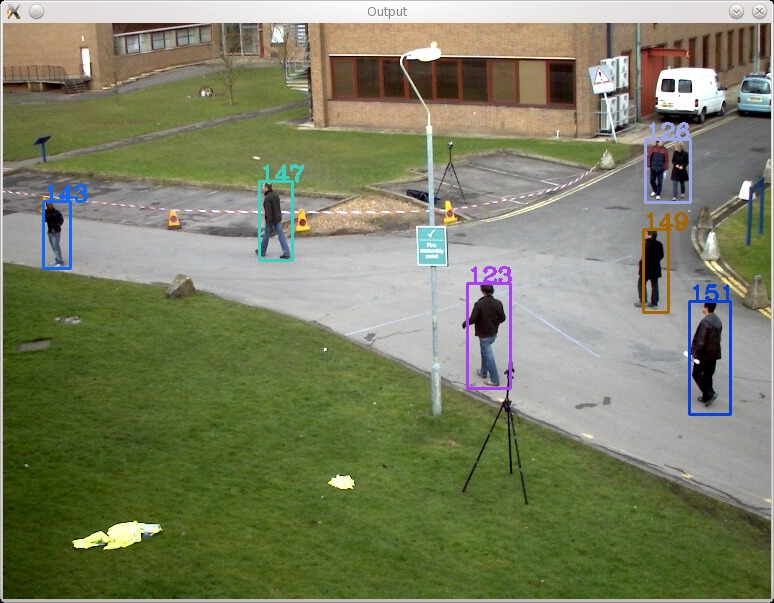
This work addresses the problem of people tracking at long range even if the target people are lost several times by the tracking algorithm. We have identified two main reasons for tracking interruption. The first one concerns interruptions that can be quickly recovered, which includes short mis-detections, occlusions with other persons or static obstacles. The second one occurs when a person is occluded or mis-detected for a long time or when the person leaves the scene and comes back latter. Our main objective is to design a framework that can track people even if their trajectory is very segmented and/or associated with different IDs. We called this problem the global tracking challenge (see Figure 21 ).
|
In order to describe a person's tracklet (segment of trajectory), we use a visual signature called Mean Riemannian Covariance Grid and a discriminative method to emphasize the main differences between each tracklet. This step improves the reliability and the accuracy of the results. By computing the distance between the visual signatures, we are able to link tracklets belonging to the same person into a tracklet cluster. Only tuples of tracklets that are not overlapping each other are used as initial candidates. Then, we use Mean Shift to create the clusters.
We evaluated this method on several datasets (i-LIDS, Caviar, PETS 2009). We have shown that our approach can perform as well as the other state of the art methods on Caviar and can perform better on i-LIDS. On PETS 2009 dataset, our approach performs better than standard tracker but cannot be compared with the best state of the art methods due to unadapted metrics.
This approach is described in detail in two articles : one published in ICIP 2012 [35] , which is focused on computing the covariance signature and the way to discriminate it and the other one published in PETS 2012 workshop (part of AVSS 2012 conference) [33] , which is focused on the method to link the tracklets.
This work will be added to a more general tracking controller that should be able to detect several kinds of detection and tracking errors and try to correct them.